




















1.Introduksjon til frekvensomformere (Variable Frequency Drives) I riket av moderne industriell kontroll en ......
LES MER
Hva er forskjellen mellom en servomotor og en trinnmotor?
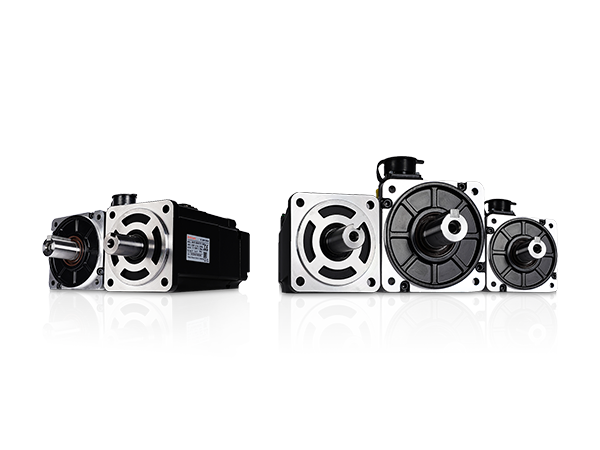
Trinnmotorer og servomotor s er begge vanlige presisjonsbevegelseskontrollaktuatorer som er mye brukt i industriell automasjon, robotikk og CNC-maskiner. Mens begge kan oppnå nøyaktig posisjons- og hastighetskontroll, varierer deres driftsprinsipper, ytelsesegenskaper og applikasjoner betydelig.
Driftsprinsipper
Trinnmotor
En trinnmotor opererer på et åpent sløyfe-kontrollsystem. Rotoren består av permanente magneter, og statorviklingene er utformet i flere faser. Ved systematisk å aktivere og deaktivere disse viklingene, roterer motoren i faste, diskrete trinn, kjent som "trinnvinkler". Hver elektrisk puls får motoren til å bevege seg ett trinn. Derfor, for å få motoren til å rotere en bestemt vinkel, trenger du bare å sende det tilsvarende antall pulser til kontrolleren.
Servo motor
A servomotor , derimot, bruker et lukket sløyfekontrollsystem. Den består av tre hoveddeler: motoren, en koder og en stasjon. Enkoderen gir tilbakemelding i sanntid på motorens posisjon og hastighet. Omformeren sammenligner deretter denne tilbakemeldingen med den innstilte målverdien og justerer motorens strøm og spenning for å sikre at den nøyaktig når ønsket posisjon og hastighet. Denne lukkede sløyfekontrollen tillater servomotor for kontinuerlig å korrigere eventuelle posisjonsfeil, noe som resulterer i høyere presisjon og dynamisk ytelse.
Ytelsesegenskaper
Trinnmotor
-
Presisjon : En trinnmotors presisjon avhenger av trinnvinkelen, vanligvis fra 0,9° til 1,8°. Micro-stepping-teknologi kan forbedre oppløsningen ytterligere, men dette kan redusere nøyaktighet og dreiemoment.
-
Dreiemoment : Trinnmotorer har høyt dreiemoment ved lave hastigheter, men deres dreiemoment avtar raskt når hastigheten øker. De gir et sterkt holdemoment når de står stille, og eliminerer behovet for en ekstern brems.
-
Hastighet : Maksimal hastighet til en trinnmotor er generelt lav, vanligvis noen hundre til tusen omdreininger per minutt (RPM).
-
Overbelastningsevne : Trinnmotorer har ikke overbelastningsbeskyttelse. Hvis belastningen er for høy, kan de "tappe trinn", og ikke følge kontrollpulsene. Dette fører til posisjonsfeil som systemet ikke kan rette opp automatisk.
Servo motor
-
Presisjon : A servomotor har svært høy presisjon, som først og fremst bestemmes av koderens oppløsning. Den kan oppnå sub-mikron posisjoneringsnøyaktighet og opprettholde denne presisjonen selv ved høye hastigheter.
-
Dreiemoment : A servomotor gir jevnt høyt dreiemoment over hele hastighetsområdet. Dreiemomentreduksjonen ved høye hastigheter er langt mindre enn for en trinnmotor. Den har også en sterk overbelastningsevne og tåler kortvarige overbelastninger på flere ganger det nominelle dreiemomentet.
-
Hastighet : Maksimal hastighet på a servomotor er mye høyere enn for en trinnmotor, og når flere tusen eller til og med titusenvis av RPM.
-
Overbelastningsevne : A servomotor Systemet har sterk overbelastningsevne og dynamisk respons. Når lasten plutselig endres, kan den raskt justere for å opprettholde den innstilte posisjonen og hastigheten, og forhindre tapte skritt.

Søknader
Trinnmotor
På grunn av deres enkle struktur, lavere kostnader og høye dreiemoment og holdekraft ved lave hastigheter, brukes trinnmotorer ofte i applikasjoner der hastigheten ikke er kritisk, belastningen er relativt konstant og sanntidstilbakemelding ikke er nødvendig. Eksempler inkluderer:
-
3D-skrivere
-
Lasergravere
-
Småskala CNC-maskiner
-
Salgsautomater
-
Tekstilmaskineri
Servo motor
På grunn av sin høye presisjon, hastighet, dreiemoment og sterke dynamiske respons, er den servomotor er mye brukt i applikasjoner med ekstremt høye ytelseskrav. Eksempler inkluderer:
-
Industrielle robotarmer
-
Høypresisjon CNC-maskinverktøy
-
Automatiserte produksjonslinjer
-
Utskrift og pakkeutstyr
-
Medisinsk utstyr
Sammendrag
Forrige innlegg
Hvordan velge riktig industriell servomotor for applikasjonen min?
Neste innlegg
Hva er forskjellen mellom en VFD og en mykstarter?
Opphavsrett 2024 Fujian Raynen Technology Co.,Ltd. Alle rettigheter reservert.
Personvernerklæring  Motorkontrollprodusenter
Motorkontrollprodusenter