





















1.Introduksjon til frekvensomformere (Variable Frequency Drives) I riket av moderne industriell kontroll en ......
LES MER
Hjem / Nyheter / Bransjenyheter / Industriell servomotor forklart: typer, utvalg og hvordan du får mest mulig ut av dem
Industriell servomotor forklart: typer, utvalg og hvordan du får mest mulig ut av dem
Hvordan en industriell servomotor faktisk fungerer
En industriell servomotor er en bevegelseskontrollaktuator med lukket sløyfe - noe som betyr at den ikke bare snurrer og håper på det beste. Den overvåker kontinuerlig sin egen posisjon, hastighet og dreiemoment gjennom en tilbakemeldingsenhet (oftest en koder eller resolver), sammenligner den faktiske utgangen med det kommanderte målet, og korrigerer ethvert avvik i sanntid. Denne selvkorrigerende sløyfen er det som skiller et servosystem fra en standard induksjonsmotor som kjører åpen sløyfe med en fast hastighet.
Kjernesløyfen fungerer slik: en bevegelseskontroller sender en posisjons- eller hastighetskommando til en servodrive. Omformeren konverterer denne kommandoen til elektrisk kraft som leveres til motoren. Motoren beveger seg, og koderen festet til motorakselen sender tilbake posisjonsdata - vanligvis millioner av pulser per omdreining på moderne industrielle kodere. Omformeren sammenligner innkommende koderdata mot den kommanderte posisjonen, beregner et feilsignal og justerer utgangseffekten for å eliminere denne feilen. Dette skjer tusenvis av ganger per sekund. Resultatet er posisjoneringsnøyaktighet innenfor ±0,01 grader og responstider i området 1 til 3 millisekunder i typiske industrielle applikasjoner.
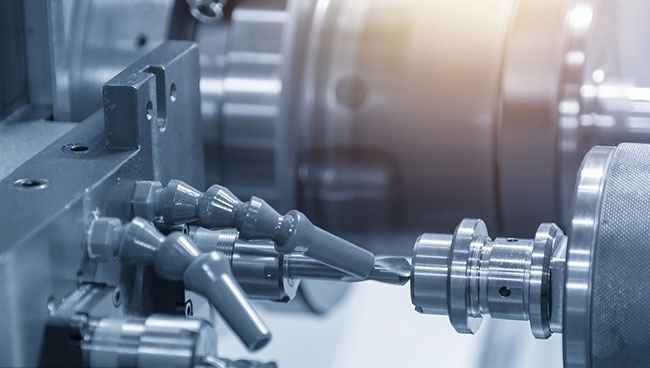
Den praktiske konsekvensen av denne arkitekturen er at et industrielt servomotordrivsystem opprettholder kommandert posisjon selv under skiftende belastningsforhold. Hvis en maskineringsspindel møter motstand midt i skjæringen, kompenserer systemet automatisk i stedet for å miste trinn eller bremse uforutsigbart - noe som er nøyaktig hva som skjer med alternativer med åpen sløyfe som trinnmotorer under overbelastning.
Typer industrielle servomotorer: AC, DC og børsteløs
Industrielle servomotorer faller inn i tre hovedteknologikategorier. Å forstå forskjellene hjelper deg med å matche riktig motortype til applikasjonskravene dine før du går inn i detaljerte spesifikasjoner.
AC servomotorer
AC servomotor s er den dominerende typen i moderne industriell automatisering. De bruker vekselstrøm og er nesten universelt børsteløse, noe som betyr ingen børstevedlikehold, lengre levetid og lavere elektrisk støy. AC servomotorer er tilgjengelige i både synkron og asynkron design. Synkrone AC-servomotorer – med permanente magneter i rotoren – er standarden for presisjonsbevegelseskontroll i CNC-maskiner, pakkelinjer og robotakser. Rotoren låser seg i takt med statorens roterende magnetfelt, og gir ekstremt lav vibrasjon, høy dreiemomenttetthet og eksepsjonell posisjonsnøyaktighet. Asynkrone AC-servomotorer (induksjonstype) er mindre presise, men mer robuste, tolerante mot tøffe miljøer og egnet for bruksområder som transportører, pumper og frekvensomformere der absolutt posisjonering ikke er nødvendig.
DC servomotorer
DC-servomotorer - spesielt børstet DC-design - var industristandarden før AC-teknologien ble modnet. De tilbyr veldig rask respons, utmerket dreiemoment med lav hastighet og enkel kontroll, men karbonbørstene krever periodisk utskifting, begrenser maksimalhastigheter og genererer elektrisk støy som kan forstyrre sensitiv elektronikk i nærheten. Børstede DC-servomotorer forblir i bruk i ettermonteringssituasjoner, visse laboratorieutstyr og applikasjoner der kostnadseffektivitet er viktigere enn vedlikeholdsfri drift. Moderne industrielle installasjoner spesifiserer sjelden nye børstede DC-servomotorer med mindre det er en overbevisende årsak.
Børsteløse DC (BLDC) servomotorer
Børsteløse DC-servomotorer kombinerer hastigheten og dreiemomentegenskapene til DC-motorer med vedlikeholdsfri drift av børsteløse AC-designer. De bruker permanentmagnetrotorer med elektronisk kommutering - halleffektsensorer eller kodere erstatter det mekaniske børste-kommutatorsystemet. BLDC servomotorer leverer høy effektivitet, høyt dreiemoment-til-vekt-forhold og lang levetid, noe som gjør dem til det foretrukne valget innen robotikk, romfartsapplikasjoner, kirurgisk utstyr og kompakte automasjonssystemer der plass og vekt er begrenset. For industriell fabrikkautomatisering er BLDC- og synkrone AC-servomotorer stort sett likeverdige når det gjelder ytelse - skillet mellom dem på applikasjonsnivå har blitt betraktelig redusert.
Rask sammenligning av industrielle servomotortyper
| Type | Børster | Dreiemomenttetthet | Presisjon | Vedlikehold | Typisk applikasjon |
|---|---|---|---|---|---|
| Synkron AC | Nei | Høy | Veldig høy | Lavt | CNC, robotikk, emballasje |
| Asynkron AC | Nei | Middels | Middels | Lavt | Transportører, pumper, vifter |
| Børstet DC | Ja | Middels–High | Høy | Høy (brush replacement) | Eldre systemer, laboratorieutstyr |
| Børsteløs DC (BLDC) | Nei | Veldig høy | Høy | Veldig lav | Robotikk, romfart, kompakt automatisering |
Nøkkelspesifikasjoner å evaluere når du velger en industriell servomotor
Servomotordatablad inneholder mange tall, og det er lett å fokusere på feil. Dette er spesifikasjonene som faktisk avgjør om en motor vil fungere pålitelig i din applikasjon.
Kontinuerlig og maksimalt dreiemoment
Kontinuerlig dreiemoment er dreiemomentet motoren kan opprettholde på ubestemt tid uten overoppheting - tallet som styrer langsiktig termisk ytelse. Maksimalt dreiemoment er vanligvis to til tre ganger kontinuerlig dreiemoment og representerer hva motoren kan levere under korte akselerasjonsstøt. For alle bruksområder med syklisk bevegelse, må du beregne rotmiddelkvadrat-momentbehovet (RMS) over hele bevegelsesprofilen og sikre at det holder seg under den kontinuerlige dreiemomentverdien. Å kjøre en industriell servomotor kontinuerlig ved eller nær toppmoment vil overopphete den og forkorte levetiden til viklingsisolasjonen. Som en praktisk regel, dimensjoner for minst 20–30 % dreiemomentmargin over ditt beregnede RMS-behov.
Fartsområde
Industrielle servomotorer er preget av to hastighetssoner: området med konstant dreiemoment under basishastigheten, der fullt dreiemoment er tilgjengelig, og feltsvekkelsesområdet over basishastigheten, der tilgjengelig dreiemoment avtar når hastigheten øker. Hvis applikasjonen din krever høyt dreiemoment ved høy hastighet samtidig, kontroller at motorens kontinuerlige effektkurve – ikke bare dens topphastighet – dekker det nødvendige driftspunktet. Maksimale hastigheter for industrielle servomotorer varierer vanligvis fra 2000 RPM til 6000 RPM, med noen kompakte høyhastighetsdesign som når 8000 RPM eller mer.
Treghets- og treghetsmatching
Treghetstilpasning er en av de viktigste og mest oversett faktorene ved valg av servomotorer. Treghetsforholdet – reflektert lasttreghet delt på motorrotorens treghet – bestemmer hvor godt servosløyfen kan kontrollere lasten. Et ideelt treghetsforhold for høyytelsesapplikasjoner er mellom 1:1 og 3:1. Opptil 10:1 er akseptabelt for mindre krevende bruksområder. Utover 10:1 dominerer belastningen systemdynamikken, noe som gjør servosløyfen vanskelig å stille inn og produserer treg, oscillerende eller ustabil oppførsel uavhengig av hvor kapabel stasjonen er. Hvis treghetsforholdet ditt er for høyt, er ofte en planetgirkasse løsningen - en 5:1 girkasse reduserer reflektert lasttreghet med en faktor 25 (med kvadratet på girforholdet), noe som kan forvandle en dårlig tilpasset akse til en veloppdragen.
IP-vurdering og miljøvern
Industrielle servomotorer er tilgjengelige i beskyttelsesklasser fra IP54 (sprutbestandig) opp til IP67 eller IP69K (fullstendig forseglet mot støv og høytrykksvannstråler). For matforedling, farmasøytisk produksjon, nedvaskingsmiljøer eller utendørs installasjoner er IP-vurderingen en ikke-omsettelig spesifikasjon – ikke en sekundær vurdering. De fleste standard industrielle servomotorer har IP65 som standardklassifisering. Sjekk akseltetningen spesifikt, ettersom noen motorer bruker en lavere klassifisert akseltetning selv når kroppen er helt forseglet.
Tilbakemeldingsenhetsoppløsning
Enkoderoppløsning bestemmer hvor fint servosløyfen kan måle og korrigere posisjon. Moderne industrielle servomotorer bruker vanligvis kodere med oppløsninger mellom 17-bit (131 072 tellinger per revolusjon) og 24-bits (16,7 millioner tellinger per revolusjon). En koder med høyere oppløsning forbedrer lavhastighets jevnhet, reduserer hastighetsrippel og muliggjør tettere posisjonsløkker - men bare hvis stasjonen kan behandle tilbakemeldingshastigheten og det mekaniske systemet er presist nok til å dra nytte av det. For de fleste standard CNC- og automasjonsapplikasjoner er en 20-bit til 23-bit absolutt enkoder tilstrekkelig. For ultrapresisjonsapplikasjoner – halvlederutstyr, metrologisystemer, optisk posisjonering – er høyere oppløsning og en koder med høy nøyaktighet berettiget.
Industrielle servomotorer: Systemet er motoren
En servomotor kan ikke evalueres isolert fra sin drivenhet. Motoren og drevet danner sammen servosystemet, og spesifisering av dem separat uten å verifisere kompatibilitet fører til integrasjonsproblemer som er kostbare å fikse etter igangkjøring. Alle store industrielle servomotorprodusenter – Yaskawa, Fanuc, Siemens, Mitsubishi, Allen-Bradley (Rockwell), Panasonic og andre – produserer matchede motordrevne familier med kjent kompatibilitet og optimaliserte autotuningalgoritmer. Å bruke en stasjon fra en produsent med en motor fra en annen er teknisk mulig, men krever nøye oppmerksomhet på tilbakemeldingsprotokollkompatibilitet, gjeldende sløyfebåndbredde og treghetstilpasningsdata.
Viktige drivfunksjoner for å evaluere sammen med motorspesifikasjonen inkluderer:
- Kontrollmoduser: Posisjons-, hastighets- og dreiemomentkontrollmoduser tjener forskjellige bruksområder. CNC-akser bruker posisjonsmodus; spindeldrev bruker ofte hastighets- eller dreiemomentmodus. Bekreft at stasjonen støtter modusen som kreves av bevegelseskontrolleren.
- Kommunikasjonsgrensesnitt: Moderne industrielle servodrev kommuniserer over EtherCAT, PROFINET, EtherNet/IP, MECHATROLINK eller CANopen, avhengig av automatiseringsplattformen. Bekreft feltbusskompatibilitet med din PLS eller bevegelseskontroller før du velger en stasjonsfamilie.
- Sikkert dreiemoment av (STO): STO er en sikkerhetsfunksjon (IEC 61800-5-2) som fjerner strøm fra motoren i en sikkerhetshendelse uten at det kreves full kontaktor mellom frekvensomformeren og motoren. De fleste nåværende industrielle servodrev inkluderer STO som standard. Bekreft dette hvis maskinen din krever en sikkerhetskategori 3 eller høyere nødstoppkrets.
- Mulighet for automatisk justering: Industrielle servodrev av høy kvalitet inkluderer automatiserte innstillingsrutiner som karakteriserer den mekaniske belastningen og setter innledende PID-gevinster. Dette eliminerer ikke behovet for manuell finjustering i krevende applikasjoner, men det forkorter igangkjøringstiden betydelig.
Enkodertyper som brukes med industrielle servomotorer
Enkoderen er det sensoriske systemet til servosløyfen. Å velge feil kodertype for miljøet eller applikasjonen er en av de vanligste årsakene til servosystemproblemer i feltet.
Inkrementelle vs. absolutte kodere
Inkrementelle kodere sender ut en strøm av pulser mens akselen roterer - kontrolleren teller disse pulsene for å beregne posisjon og hastighet. Den kritiske begrensningen er at posisjonsdata går tapt ved strømbrudd, noe som krever en målsøkingssekvens hver gang maskinen starter opp. For applikasjoner der målsøking er upraktisk – vertikale akser som kan falle under målsøking, maskiner i kontinuerlig 24/7-drift, eller akser der utgangsposisjonen ikke er lett tilgjengelig – passer inkrementelle enkodere dårlig.
Absolutte kodere gir en unik digital kode for hver akselposisjon, og beholder denne informasjonen selv etter en strømsyklus. Ingen målsøking er nødvendig ved oppstart. Single-turn absolutte encodere sporer posisjon innen én omdreining; multi-turn absolutte encodere (ved hjelp av enten giret tellemekanismer eller batteristøttet minne) sporer totale omdreininger i tillegg. For industrielle applikasjoner som involverer vertikale akser, portaler eller maskiner der oppstartstid og posisjoneringssikkerhet er kritisk, er absolutte enkodere sterkt foretrukket til tross for høyere kostnader.
Optiske vs. magnetiske kodere
Optiske kodere bruker en lyskilde og en kodeskive med nøyaktig etsede mønstre for å generere posisjonssignaler. De oppnår svært høye oppløsninger – opptil 24-bit eller høyere – og utmerket nøyaktighet, men den optiske disken er sårbar for forurensning av olje, kjølevæske og fine partikler. Optiske kodere er passende for rene miljøer som halvlederproduksjon, presisjonsmontering og medisinsk utstyr. Ved industriell maskinering, metallbearbeiding eller utendørs bruk krever de beskyttelsestiltak eller erstattes av magnetiske alternativer.
Magnetiske kodere bruker magnetiserte polmønstre på et målhjul og en sensor som oppdager magnetfeltvariasjonen når akselen roterer. De tilbyr lavere oppløsning enn optiske design, men er svært motstandsdyktige mot forurensning, fuktighet, støt og vibrasjoner - forholdene som er vanlige i tunge industrielle miljøer. Moderne magnetiske kodere med 17-bit til 19-bits oppløsning er tilstrekkelig for de fleste industrielle bevegelseskontrollapplikasjoner der miljøet utelukker optisk teknologi.
Dimensjonering av en industriell servomotor: en praktisk arbeidsflyt
Underdimensjonering av en servomotor forårsaker stoppfeil, termiske nedstengninger og produksjonsavbrudd. Overdimensjonering sløser med kapital, øker treghetsmisforholdet og kan gjøre kontrollsløyfen vanskeligere å justere. En systematisk arbeidsflyt for dimensjonering unngår begge problemene.
- Trinn 1 — Definer bevegelsesprofilen: Etabler hele bevegelsessyklusen: avstanden tilbakelagt per syklus, akselerasjons- og retardasjonstidene, periodene med konstant hastighet og oppholdstiden. Uttrykk dette som en trapesformet eller S-kurve hastighetsprofil. Denne profilen er grunnlaget for alle dreiemoment- og hastighetsberegninger.
- Trinn 2 — Beregn lasttreghet: Sum den reflekterte tregheten til hver roterende og translaterende komponent ved motorakselen - den mekaniske belastningen, koblingen, girkassen, kuleskruen eller beltet, og eventuelt tilkoblet verktøy. Dette er den totale belastningstregheten motoren må akselerere og bremse på hver syklus.
- Trinn 3 — Beregn nødvendige dreiemomenter: Bestem akselerasjonsmoment (J_total × vinkelakselerasjon), friksjonsmoment (målt eller estimert fra drivverket), og gravitasjonsmoment (for ikke-horisontale akser). Sum disse for toppmoment under akselerasjon. Beregn RMS-moment over hele syklusen for termisk dimensjonering.
- Trinn 4 — Sjekk treghetsforhold: Del total lasttreghet med kandidatmotorens rotortreghet. Mål 3:1 eller lavere for applikasjoner med høy ytelse; godta opptil 10:1 for moderat dynamikk. Hvis forholdet overstiger 10:1, legg til en girkasse, velg en motor med høyere treghet eller reduser belastningstregheten ved kilden.
- Trinn 5 — Bekreft hastighetskravet: Bekreft at den nødvendige motorhastigheten (med hensyn til ethvert girforhold) faller innenfor motorens kontinuerlige dreiemomentområde. Hvis høy hastighet og høyt dreiemoment kreves samtidig, kontroller motorens kontinuerlige effektkurve på det driftspunktet.
- Trinn 6 — Bruk sikkerhetsmarginer: Velg den endelige motoren med minst 20–30 % margin på både toppmoment og RMS-moment. Virkelige belastninger overstiger ofte teoretiske beregninger på grunn av friksjonsvariasjoner, verktøyendringer og dynamiske lastforstyrrelser.
PID-tuning for industrielle servomotorsystemer
Selv en servomotor med riktig størrelse med en riktig tilpasset drift vil yte dårlig hvis kontrollsløyfen ikke er innstilt. PID-innstilling (Proportional-Integral-Derivative) justerer de tre kontrollforsterkningene som bestemmer hvor aggressivt frekvensomformeren reagerer på posisjonsfeil, hvordan den eliminerer steady-state offset og hvordan den demper oscillasjon.
Hva hver gevinst gjør
Proporsjonal (Kp) gevinst bestemmer den umiddelbare responsen på posisjonsfeil — høyere Kp betyr raskere, mer aggressiv korreksjon. For høyt og systemet svinger; for lavt og den reagerer tregt, med store posisjonsfeil under belastning. Start med å øke Kp til de første tegnene på svingning vises, og reduser deretter med ca. 20 %.
Derivat (Kd) gevinst demper oscillasjon ved å reagere på endringshastigheten for feil, ikke feilstørrelsen. Å legge til Kd etter innstilling av Kp tillater en høyere proporsjonal forsterkning uten ustabilitet. Tenk på det som kontrollsystemets støtdemper. For mye Kd forsterker støy og forårsaker høyfrekvent skravling.
Integrert (Ki) forsterkning akkumulerer feil over tid og eliminerer steady-state posisjonsoffset som proporsjonal kontroll alene ikke kan korrigere fullt ut. Legg til Ki sist og i små trinn - for mye integrert forsterkning forårsaker langsom, lavfrekvent oscillasjon kalt "integral windup".
Praktisk tuningveiledning
De fleste moderne industrielle servodrev inkluderer auto-tuning-funksjoner som setter innledende gevinster basert på målt mekanisk respons. Bruk auto-tune som utgangspunkt, ikke et ferdig resultat. Etter autoinnstilling, verifiser ytelsen med den faktiske produksjonsbevegelsesprofilen – raske sykluser med full belastning – ikke bare et sakte testtrekk. Hvis det mekaniske systemet har samsvar (en remdrift, lang fleksibel kobling eller flertrinns girkasse), kan hakkfiltre ved resonansfrekvensen til det mekaniske systemet være nødvendig for å undertrykke oscillasjon som PID-innstilling alene ikke kan eliminere. Bode-plottanalyse tilgjengelig i avanserte servodrivprogramvarepakker er den mest effektive måten å identifisere og undertrykke mekaniske resonanser.
Industrielle servomotorapplikasjoner etter industri
Industrielle servomotorer brukes der bevegelser må være presise, repeterbare og raske. Tabellen nedenfor oppsummerer de vanligste industrielle bruksområdene, de primære ytelseskravene i hver og den typiske motortypen som brukes.
| Industri | Typisk applikasjon | Primært krav | Vanlig motortype |
|---|---|---|---|
| CNC maskinering | Aksedrev, spindler | Høy positioning accuracy, rigid speed control | Synkron AC servo |
| Robotikk | Fellesaktuatorer, endeeffektorer | Høy torque density, low inertia, compact size | BLDC servo, synkron AC servo |
| Emballasje | Plukk-og-plasser, skjema-fyll-forsegling, merking | Raske syklustider, repeterbar posisjonering | Synkron AC servo |
| Halvleder / Elektronikk | Waferhåndtering, PCB-montering | Ultrahøy presisjon, rene romkompatibilitet | Lineær servo, høyoppløselig AC-servo |
| Utskrift / Konvertering | Nettspenningskontroll, registerkontroll | Jevn hastighetskontroll, rask avvisning av forstyrrelser | Synkron AC servo |
| Medisinsk utstyr | Kirurgiske roboter, bildesystemer | Stillegående drift, presis dreiemomentkontroll, kompakt | BLDC servo |
| Metallforming | Pressdrev, bøyemaskiner | Høy peak torque, position accuracy at low speed | Synkron AC servo (high-torque frame) |
Vedlikehold og feilsøking for industrielle servomotorer
Industrielle servomotorer er designet for lang levetid - vanligvis godt over 20 000 timer i riktig påførte og vedlikeholdte systemer. De fleste feltfeil skyldes et lite antall identifiserbare årsaker, og de fleste av dem kan forebygges med rutinemessig vedlikehold.
De vanligste feilmodusene
- Overoppheting: Den viktigste årsaken til forringelse av viklingsisolasjon og for tidlig motorsvikt. Forårsaket av underdimensjonering, blokkerte kjøleventiler, for høy omgivelsestemperatur eller gjentatte driftssyklusbrudd. Infrarød termisk avbildning under normal drift er den raskeste måten å identifisere motorer som går varmere enn forventet før feil oppstår.
- Koderfeil: Forurensning (støv, olje, kjølevæske) på optiske kodeplater forårsaker signalfeil; mekanisk støt skader kodelagrene; kabeldegradering fra gjentatt bøying eller EMI forårsaker periodiske tilbakemeldingsfeil. Symptomer inkluderer uregelmessig bevegelse, følgefeil og posisjonsavvik. Sjekk jording av kabelskjermingen først — dårlig EMI-skjerming er den vanligste årsaken til problemer med kodersignalet i industrielle miljøer.
- Lagerslitasje: Vises som vibrasjon, støy og økt strømtrekk. Forårsaket av høye radielle eller aksiale belastninger som overskrider motorens akselbelastning, feiljustering eller inntrengning av forurensning gjennom en sviktende akseltetning. Skift ut lagre med produsentens anbefalte intervaller eller når vibrasjonstrend viser økende nivåer.
- Plasseringsfeil: Hvis en servoakse begynner å mangle kommanderte posisjoner eller utløses etter feil, er årsaken vanligvis koderkalibreringsdrift, problemer med tilbakemeldingskabel eller degradering av PID-forsterkning fra endrede mekaniske forhold (slitt girkasse, løs kobling). Kalibrer koderen på nytt, inspiser tilbakemeldingsledningene og kjør stasjonens auto-tune-funksjon på nytt.
- Elektriske feil: Isolasjonsbrudd fra fuktinntrengning, spenningstopper på bussen eller jordsløyfer mellom frekvensomformeren og motoren. Kjør periodiske isolasjonsmotstandstester (Megger-tester) på motorviklinger og kontroller at spenningsbeskyttelsen for drivbussen er innenfor spesifikasjonene.
Sjekkliste for rutinemessig vedlikehold
- Rengjør kjøleribber og ventilasjonsåpninger månedlig i støvete omgivelser; kvartalsvis i rene miljøer.
- Inspiser motorakseltetningen og koderkabelens koblinger for olje- eller fuktighetsforurensning hver sjette måned.
- Kontroller koblingsinnretting og festemoment etter alt mekanisk arbeid på den drevne maskinen.
- Logg strømtrekk og motortemperatur med jevne mellomrom og trend over tid - gradvise endringer indikerer utvikling av mekaniske eller elektriske problemer før de forårsaker uplanlagt nedetid.
- Kontroller batterispenningen på batteristøttede multi-turn absoluttkodere årlig og skift ut før batteriet faller under minimumsterskelen. Et dødt giverbatteri resulterer i tap av den absolutte posisjonsreferansen og en målsøkingsfeil ved oppstart.
- Utfør isolasjonsmotstandstester årlig på motorviklinger for å oppdage fuktinntrengning før det forårsaker viklingsfeil.
Industriell servomotor vs. trinnmotor: Velg mellom dem
For bevegelseskontrollapplikasjoner i lavt til middels dreiemomentområde med begrensede budsjetter, er trinnmotorer et vanlig alternativ til industrielle servomotorer. Å forstå hvor hver teknologi virkelig er det beste valget forhindrer både overprosjektering og underspesifisering.
Trinnmotorer opererer med åpen sløyfe - de beveger seg i faste trinnvise trinn uten posisjonstilbakemelding. De er enklere, billigere og krever ikke stasjonsjustering. De passer for lett belastning, lave hastigheter og applikasjoner der det å gå glipp av et trinn av og til er akseptabelt eller belastningsforholdene er forutsigbare og konsistente. Begrensningene vises ved høyere hastigheter (dreiemomentet faller kraftig over noen få hundre omdreininger per minutt), under variable eller sjokkbelastninger (trinn kan overses uten noen feilindikasjon), og i applikasjoner med høy driftssyklus (termisk styring blir vanskelig uten tilbakemelding).
Industrielle servomotorsystemer er det riktige valget når:
- Posisjoneringsnøyaktighet under varierende belastning er obligatorisk - en servo korrigerer for forstyrrelser; en stepper kan ikke.
- Applikasjonen krever drift ved høyere hastigheter med fullt dreiemoment - servomotorer opprettholder nominelt dreiemoment over et bredt hastighetsområde.
- Bevegelsesprofilen involverer raske akselerasjons- og retardasjonssykluser - servoer håndterer dette mer effektivt på grunn av regenerativ bremseevne i moderne stasjoner.
- En savnet posisjon vil forårsake en kvalitetsfeil, en maskinkrasj eller en sikkerhetshendelse - servosystemet vil feile og alarmere; stepperen vil stille miste posisjonen.
- Driftssyklusen er høy og kontinuerlig — servomotorer med riktig dimensjon kjører kjøligere og mer effektivt enn steppere med tilsvarende utgangseffekt.
Forrige innlegg
Lavspent variabel frekvensomformer: Alt du trenger å vite før du kjøper eller installerer en
Neste innlegg
Human Machine Interface forklart: Hva det er og hvordan du får det riktig
Opphavsrett 2024 Fujian Raynen Technology Co.,Ltd. Alle rettigheter reservert.
Personvernerklæring  Motorkontrollprodusenter
Motorkontrollprodusenter